~パラレルリンクを活用した小型軽量ワークのピッキングシステム~
すべてのお客さまのニーズに応えるには、外箱だけではなく個装された小箱の対応も必要不可欠となるため、作業工程が増しタクトタイムにも影響を及ぼしてしまいます。
小物ピッキングセルは、不揃いな小箱をロボットにより整列・仕分け・選別をしてパレットやコンテナに積込みます。また、高速ロボットはフレームの中にセル化されているため、既設ライン上に設置でき、微調整ですぐに稼働が可能となります。工程の変更が容易となり、タクトタイムの短縮にも大きく貢献いたします。
個装への工程が増えたことで、ラインの大改造が必要になった。
現在のラインに機械、ロボットを追加するスペースが確保できない。
ラインの変更にはかなりの時間を要するため、なかなか決断ができない。
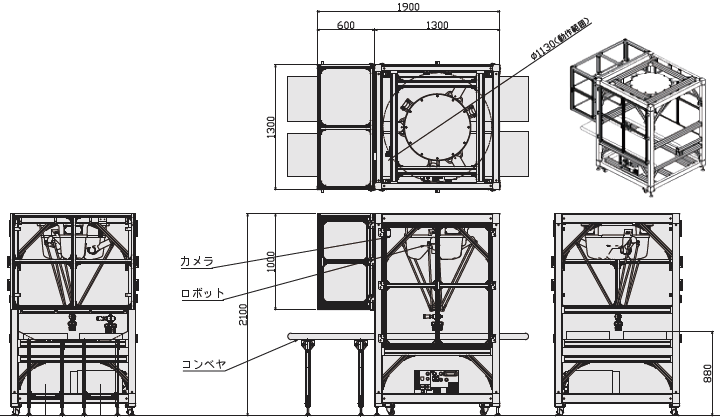
ピッキングに適した高速ロボットはフレームの中に格納(セル化)されており、動作に関わることはパッケージ化されているため、微調整ですぐに稼働できる。
セル化されているので、既設ライン上に設置でき、工程の変更が容易。
タクトタイムも短縮できた。
| 用途 | 想定作業 | 作業イメージ |
|---|---|---|
| 整列 | 不揃いな姿勢で搬送される小箱などを整列して搬送、または、パレット、コンテナに積込みます | 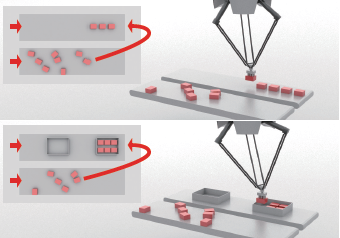 |
| 仕分 | 不揃いな姿勢で搬送される小箱などを仕分けして搬送、または、パレット、コンテナに仕分けして積込みます | 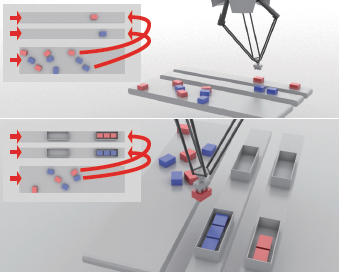 |
| 選別 | 同一コンベア上を搬送される小箱などで異形上のものを「別コンベア」に選別します | 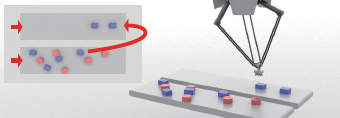 |
| 箱詰め | 整列され搬送される数個の小箱などを段ボール箱へ積込みます | 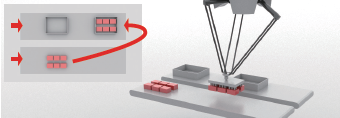 |
※画像はイメージです
| 対象業種 | 食品、化粧品、薬品、物流 |
|---|---|
| 対象工程 | ピッキング作業 |
| 3kgモデル | 8kgモデル | ||
|---|---|---|---|
| ロボット可搬質量(kg) | 3 | 8 | |
| リーチ(mm) | 1130 | 1130 | |
| ハンド | 吸着 *1 | ||
| ワークサイズ(mm) | 最大 | 400W × 300L | |
| 最少 | 15W × 15L | ||
| 荷重(kg) | 最大 | 2.4 | 7.4 |
| コンベア設置幅(mm) | 最大 450W × 2本 *2 | ||