

3Dビジョンとは
3Dビジョンとは、物体を3次元的に認識する計測器です。
3Dビジョンがワーク(ピッキングの対象物)を3次元的に認識することにより、ロボットがバラ積み状態のワークを正確に把持することができます。
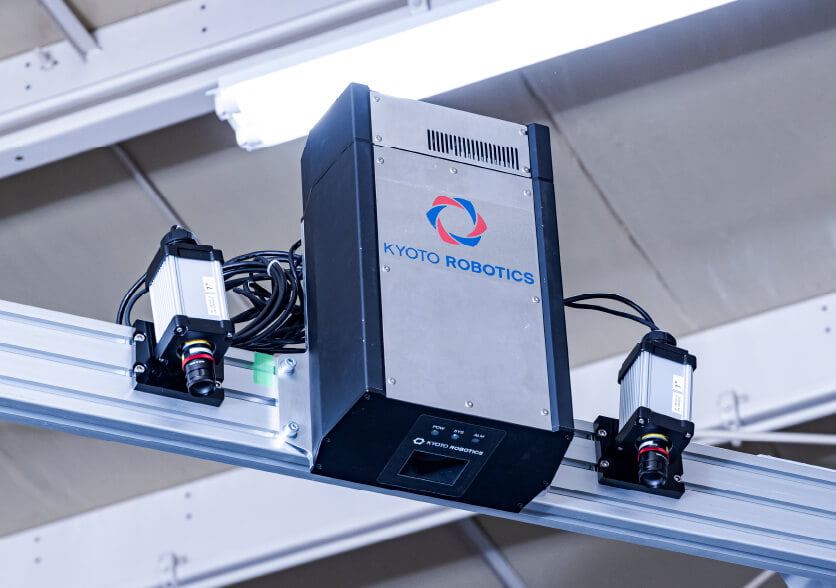
中央の四角いボックスが光を照射するプロジェクタ、その両サイドにカメラという機器構成となっています(機種によりカメラの個数は異なります)。
① ハードウェア(3Dビジョン本体)
3Dビジョンはプロジェクタとカメラから構成されています。
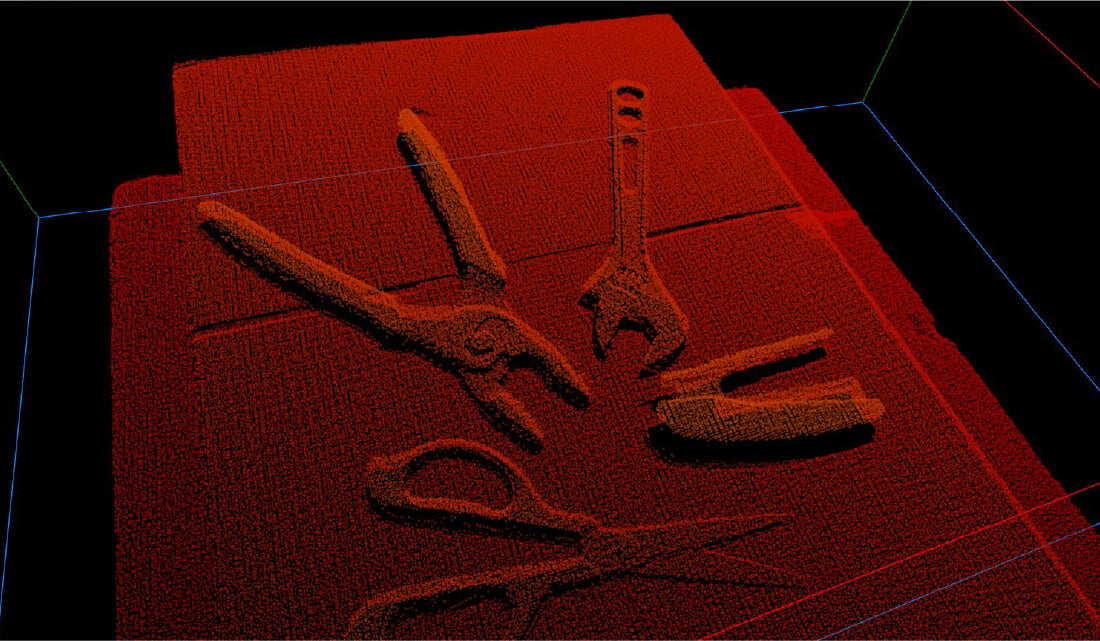
実際に3Dビジョンを使用してワークを認識したのが右の画像です。
実はこの画像は、小さな3次元の座標情報(x,y,z)を持った点の集合でできています。これを点群と言います。
点群は、プロジェクタから照射された縞模様を、サイドのカメラで認識することにより取得します。
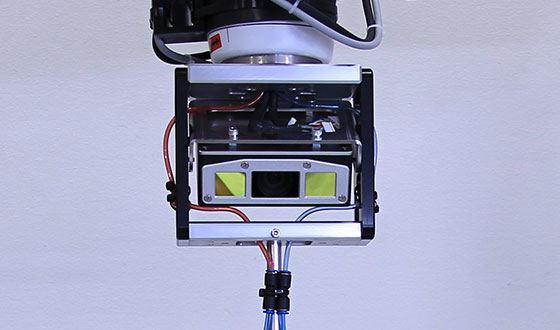
下の写真では、100万点以上の点群を1秒未満の時間で撮像し、3次元の物体認識を行っています。この高速で高精度な処理が、ロボットの運用能力を高めるキーとなっています。


② ソフトウェア(画像認識)
ここでは主に製造業のバラ積みピッキングで使用されているCADマッチングによる認識と、
物流業で採用されているマスタレス認識の二つのテクノロジーを紹介します。
⑴ CADマッチング
事前に登録したワークのCADデータを基に、実際のワークを認識します。
下記の図のように、撮影した写真の色の濃淡を識別して認識を行う輪郭マッチングと、
点群計測による点群マッチングの二つの認識により、事前に登録したワークを探し出します。
ス テ レ オ カ メ ラ 撮 影 画 像

撮像画像

輪郭抽出
プ ロ ジ ェ ク タ パ タ ー ン 照 射

投影画像
点群計測
輪郭マッチング
照合

3Dモデル
(STL)
照合
点群マッチング

3次元認識結果
ワークの「位置・姿勢」を認識、
ピッキング座標をロボットに送信
CADマッチング方式では、ワークを正確に把持することができるため、次工程で精度が求められるような工程で活躍します。
⑵ マスタレス
事前のワーク登録なしで認識を行うことができます。
多品種を扱う工程の場合でも、毎回ワーク登録を行う必要がなく、より汎用的な運用が可能となります。
ロボットが機械学習により「箱らしさ」を学習し、事前登録なしでも安定的な認識を実現しています。
従来システム
お客様がマスタを事前に
入力・登録してピッキング
マスタレス
事前のケース情報を用いずに
未知のケースをピッキング




