Kyoto Roboticsの技術
これまでKyoto Roboticsが開発してきた
テクノロジーの一部を紹介します。

3Dビジョン
3Dビジョンとは、物体を3Dで認識する計測器(カメラ)です。高精度・高速の三次元認識がKyoto Roboticsのコアテクノロジーです。


ロボット制御
ロボット制御に関する弊社技術の
一部を紹介します。
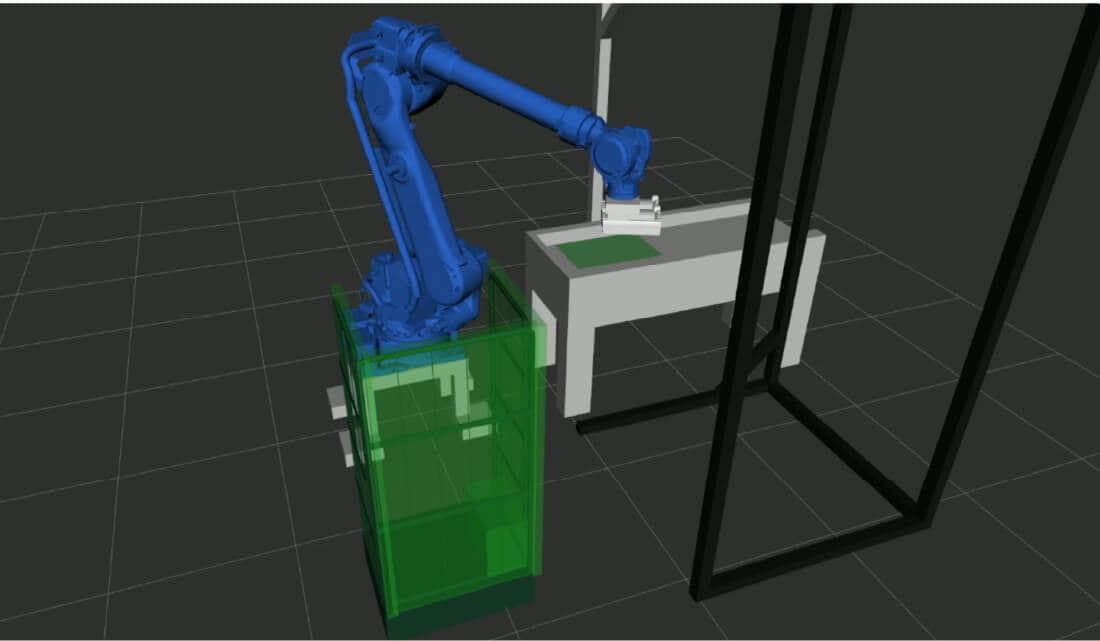
モーションプランニング
3ロボットティーチング不要で、動作の制御を行う技術です。什器にケースを積み付ける際などは、什器の形状や障害物を考慮してモーションプランニングを行います。箱を安全に搬送するため、箱のサイズと重量、ハンドの吸着力、吸着面積、箱にかかる力・トルクなどを考慮します。
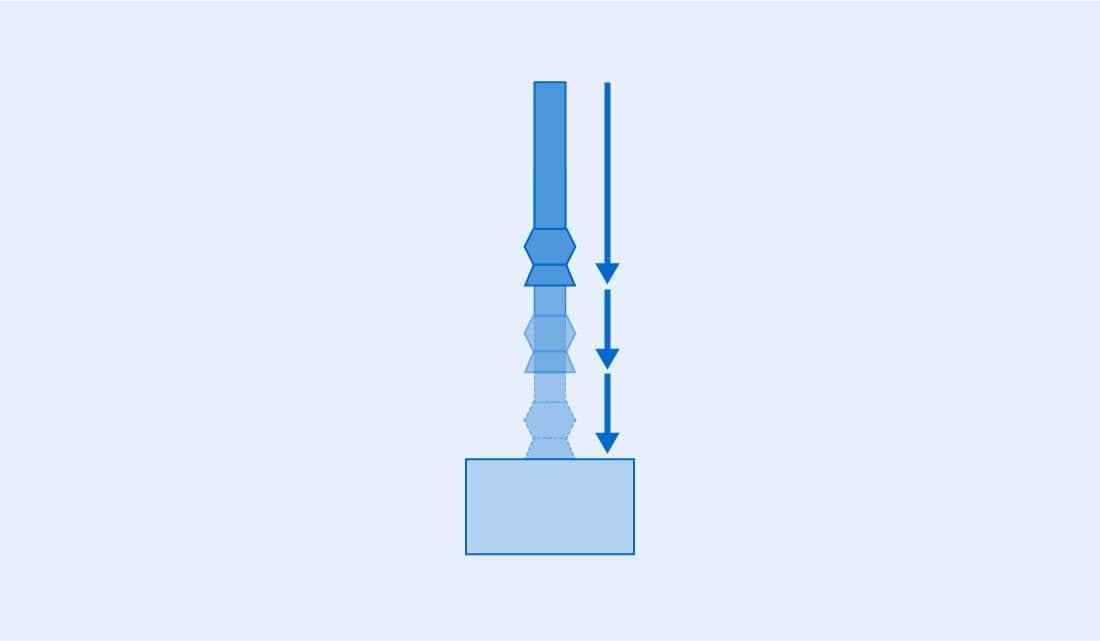
アプローチ各軸補間分割動作
特異点を経由するアプローチでも動作可能になるように、アプローチ経路を分割し各軸補間動作させることにより、確実にワークをピックします。
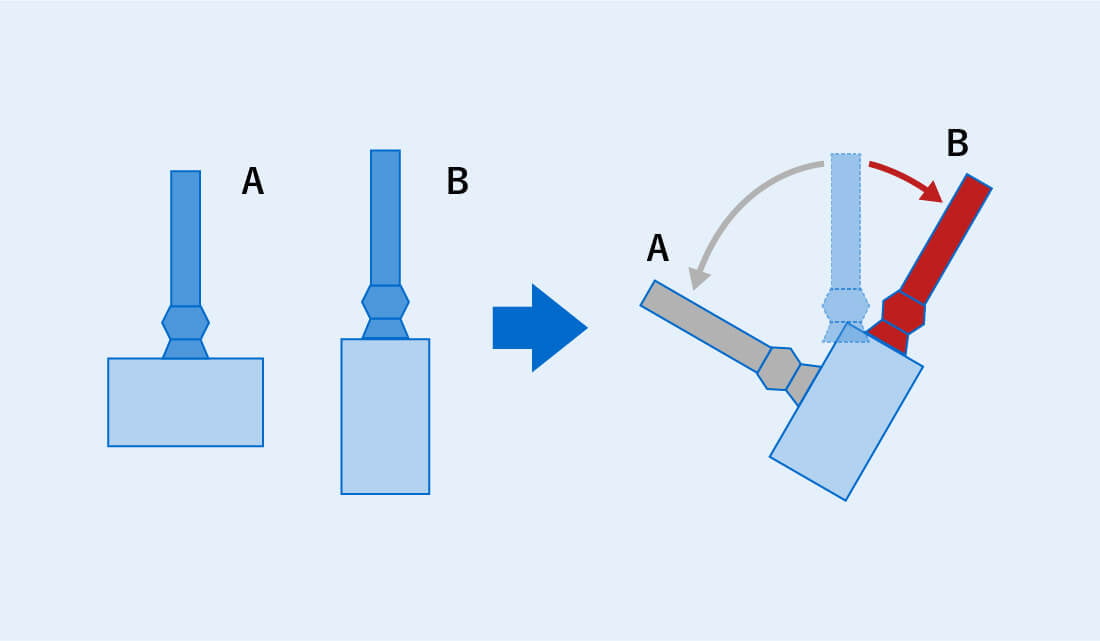
ピッキング教示(FA向け)
ワークをどのようにピックするかを教示します。1つのワークに対して複数の教示が登録可能です。ロボットを直接操作することによる、直感的な教示が可能です。
ロボット連携ライブラリ
ロボットからビジョンを制御するための連携ライブラリを提供しています。
連携ライブラリを用いることで簡単にピッキングアプリケーションを作成することが可能です。
各ロボットメーカーに対応しており、ロボットペンダント上でインターフェイスをお使いいただけます。

AI・機械学習
ロボットの知能化に欠かせない
キーパーツです。
ワークの「らしさ」を学習
多品種の段ボールケースを認識する際は、機械学習を使用した3次元認識を行います。
「箱らしさ」を学習したロボットは、パレット上にあるケースのおおよその位置を推定することができ、画像処理と3次元データ処理を組み合わせることにより99.9%の成功率でケースを認識することができます。
認識が難しいケースの場合は、ロボット自らの判断によりケースを少しずらし、再認識を行うことにより、正確にケースをピックすることができます。
ロボット制御
ロボットモーションのAIプランナーは、ロボットがワークを把持してからプレースするまでの最短ルートを、3次元空間で2方向からツリーを伸ばしながら検索します。そしてそれを最適化し、経路のショートカットを作成します。
-
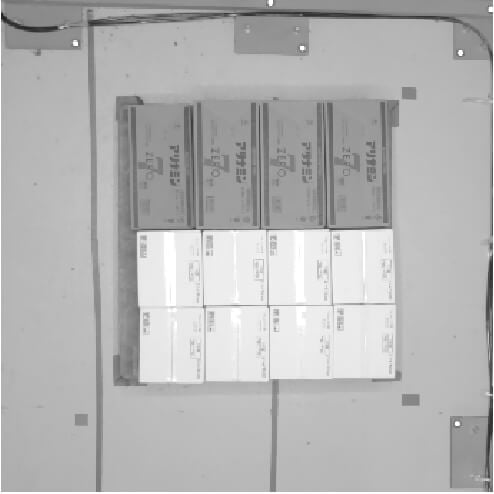
図1 Mixed pallet
-

図2 Recognition results
-
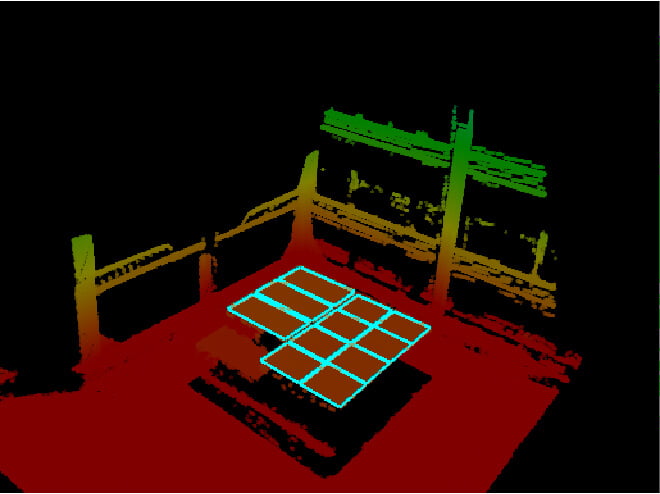
図3 Mixed pallet

ハンド開発
ロボットハンドの開発も自社で
行っています。
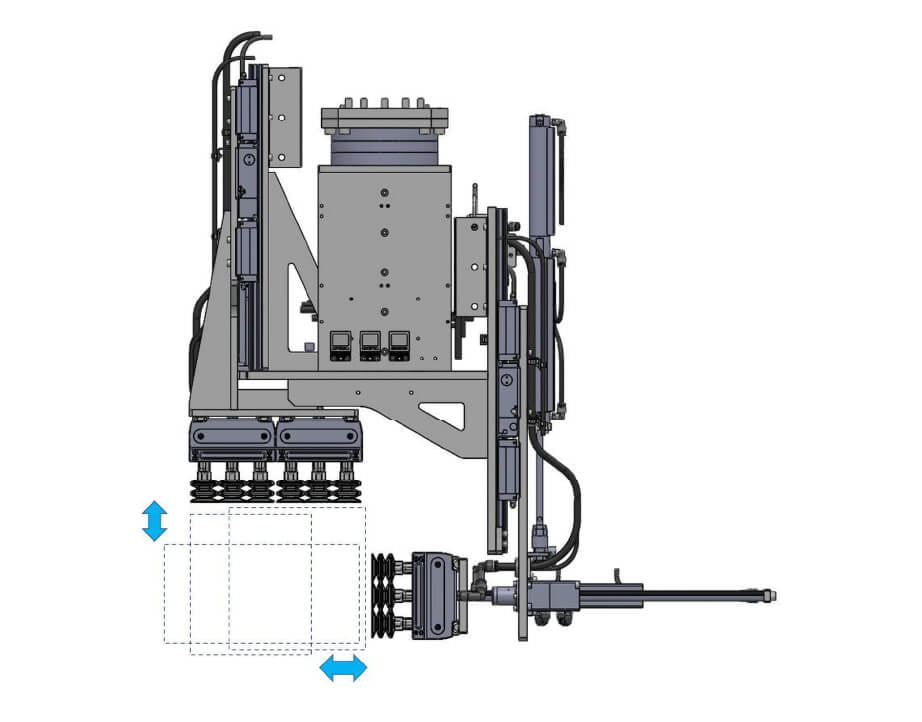
より汎用性の高いハンドの開発
ワークを把持するロボットハンドの開発も自社で行っています。
物流業では、多品種の段ボールケースをピッキングする必要があります。飲料ケースのような重量に対し箱の強度が弱いケースや、フタが剥がれやすい構造になっているケースなどの品種に対しても、汎用的に用いることが可能なロボットハンドが求められます。Kyoto Roboticsではこれらに対応すべく、積み付け位置や箱サイズによって、把持位置を微調整できる可変式ハンドの開発などを行っています。