




導入(運用)までの流れ
当物流センターでは、商品を店舗へ出荷する際の荷下ろし作業をロボットにより自動化しています。飲料ケースの荷下ろし作業のような重労働は、労働環境改善の観点や、人手が集まりにくいという観点から、ロボット化が急速に進んでおります。
-
1.課題
人手による重労働作業
-
2.提案
多品種対応のマスタレスデパレタイズロボットと特殊ハンド
-
3.解決
人手を介さないデパレタイズロボット
-
4.運用
フォークマンの作業を効率化
1.課題
人手による重労働作業

飲料ケースの荷下ろし作業は重労働にあたるため、労働環境や働き手不足という点から、自動化を検討されていました。
2.提案
多品種対応のマスタレスデパレタイズロボットと特殊ハンド
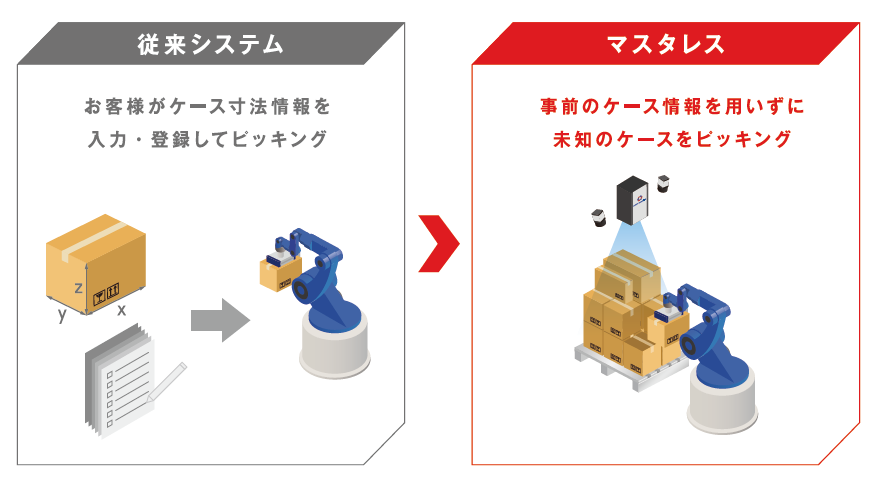
本工程がこれまでロボット化ができなかった理由として、下記の問題点がありました。
①多品種ケースへの対応が必要であったこと
②通常の上面吸着ハンドだとケースが破れてしまうこと
それらを解決しするために、下記の機能を兼ね備えたデパレタイズロボットをご提案しました。
①多品種対応のマスタレス機能(品種毎の登録作業が不要)
②ケースの高さごとにロボットハンドが可変する特殊ハンド
3.解決
人手を介さないデパレタイズロボット

マスタレス機能により、ロボットティーチングや品種登録が不要になり、人手を介さない荷下ろし作業が可能となりました。 また可変式の特殊ハンドにより、ケースへのダメージを最小限に抑えています。
4.運用
フォークマンの作業を効率化

パレットマガジンによる空パレットのストックや、コンベアでバッファーを持たせることにより、フォークマンが作業する回数を削減しました。

