



導入(運用)までの流れ
ケースデパレタイズの中でも重労働となる、飲料ケースのデパレタイズを自動化いたしました。
-
1.課題
ハンドリングが難しく、人手が集まりにくい飲料用ケースへの対応
-
2.提案
マスタレス対応とL字型ハンドの使用
-
3.解決
スタンドアローン環境での自動システムが成立。重く弱いケースでも搬送可能。
-
4.運用
フォークリフトでパレット投入すれば自動でデパレタイズ開始。
1.課題
ハンドリングが難しく、人手が集まりにくい飲料用ケースへの対応
飲料ケースのハンドリングは作業の負荷が大きいため、人手不足が深刻な作業の一つです。またロボットで段ボールケースを扱おうとした場合、ケース上面にミシン目が入っているため、上面だけで吸い上げることができません。
2.提案
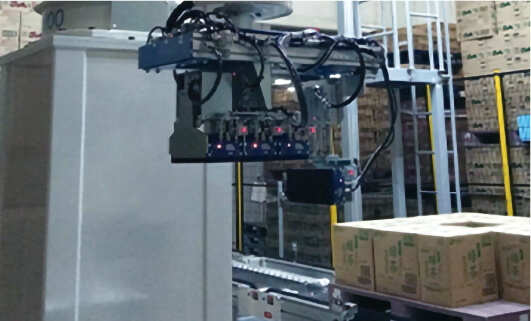
マスタレス対応とL字型ハンドの使用
1)ケース寸法をその場で自動検知するマスターレス方式のビジョンシステム 2)上面と側面で支えるL字型ハンド をご提案致しました。
3.解決
スタンドアローン環境での自動システムが成立。重く弱いケースでも搬送可能。
外部からの情報無しでのデパレタイズ自動化が成立しました。 上面が弱いケースも、側面のパッドの支えにより、ケース上面の破れを防いています。
4.運用
フォークリフトでパレット投入すれば自動でデパレタイズ開始。
マスターレスなので、パレットを投入すれば、自動でデパレタイズ開始します。 全数デパレし、空パレットも自動排出されます。

